
La apliko de portrobotoj en la pordo- kaj fenestra industrio ĉefe koncentriĝas pri aŭtomata ŝarĝado kaj malŝarĝado, manipulado kaj stakado.
La apliko de portrobotoj en la pordo- kaj fenestra industrio ĉefe speguliĝas en la jenaj aspektoj:
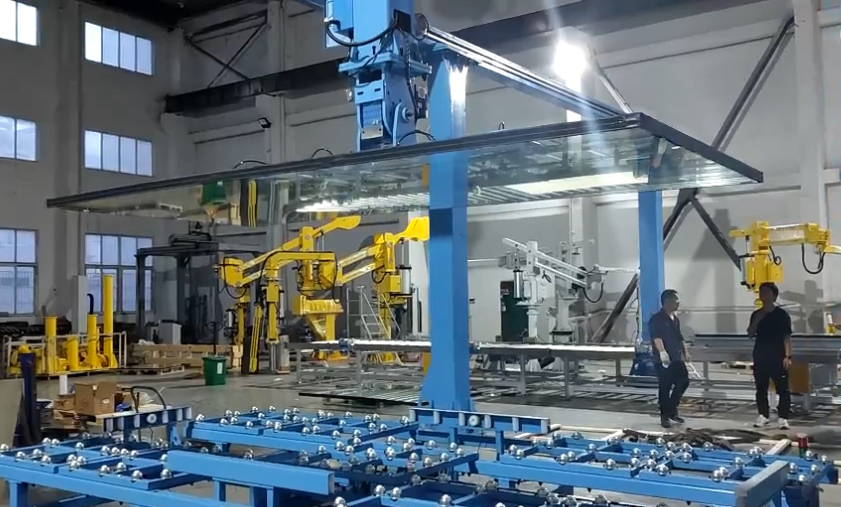
Aŭtomata ŝarĝado kaj malŝarĝado: La portroboto povas precize kaj rapide plenumi la ŝarĝajn kaj malŝarĝajn taskojn de pordaj kaj fenestraj materialoj, redukti la laborintensecon de laboristoj kaj plibonigi produktadan efikecon. Per la ligo kun CNC-maŝiniloj kaj aliaj ekipaĵoj, la traba manipulilo povas atingi alt-efikecajn kaj alt-stabilecajn ŝarĝajn kaj malŝarĝajn operaciojn por kontentigi la produktadajn bezonojn de malsamaj specoj de produktoj.
Manipulado kaj stakado: En la produktada procezo de pordoj kaj fenestroj, la pordoroboto povas facile manipuli pordajn kaj fenestrojn de diversaj formoj kaj pezoj, realigi aŭtomatan manipuladon kaj stakadon, redukti laborforton kaj plibonigi laborefikecon.
Alt-preciza poziciigado: La gantria roboto estas movata per servomotoro, kaj estas movata per ilarbretoj kaj rulglitiloj por atingi alt-precizan poziciigadon, certigante la precizecon kaj stabilecon de materialmanipulado.
Forta adaptiĝkapablo: La portika roboto povas esti adaptita laŭ la faktaj produktadbezonoj por plenumi malsamajn laborscenarojn kaj procezajn postulojn. Samtempe, ĝi ankaŭ povas esti ligita kun alia aŭtomata ekipaĵo por realigi la aŭtomatigon kaj inteligentecon de la produktadlinio.
Resumante, la apliko de pordorobotoj en la pordo- kaj fenestra industrio ne nur plibonigas produktadan efikecon kaj reduktas kostojn, sed ankaŭ plibonigas produktokvaliton kaj konstantecon. Ĝi estas grava ilo por pordo- kaj fenestroproduktantoj por atingi aŭtomatigitan kaj inteligentan produktadon.
Afiŝtempo: 2-a de septembro 2024